
低噪音、高稳定性;陀螺偏置不稳定性: 0.8 °/h;角度随机游走:0.06°/√h
6 个自由度:三重陀螺仪:±450°/s;三轴加速度计:±10G
数据分辨率:16 / 32bit
数字串行接口:SPI/UART
校准稳定性:偏差、比例因子、轴向对齐
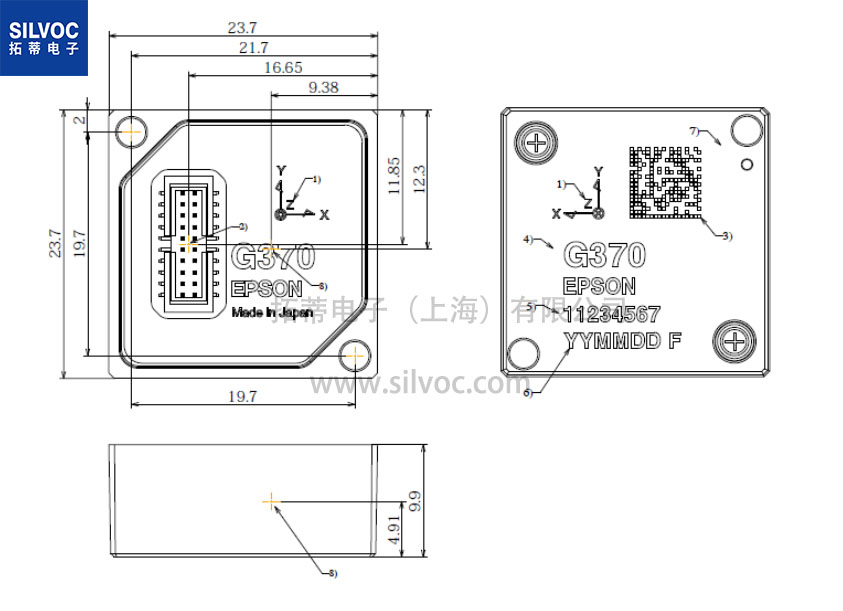
M-G370PDF: 爱普生(EPSON)惯性测量单元(IMU)
爱普生(EPSON)的FOG级性能IMU,尺寸为1立方英寸

M-G370PDF概述
M-G370PDF是一款具有6个自由度的小尺寸惯性测量单元(IMU):三轴角速率和线性加速度,并通过使用高精度补偿技术提供高稳定性和高精度的测量能力。 各种校准参数存储在 IMU 的内存中,并在 IMU 上电后自动反映在发送到应用程序的测量数据中。 通过对主机通信的通用 SPI/UART 支持,M-G370PDS0 减少了用户引入惯性测量的技术障碍,并最大限度地减少了设计资源以实现惯性运动分析和控制应用。 IMU 的高稳定性、高精度、小尺寸和超低噪声等特性使其易于创建和区分工业系统各个领域的应用,尤其是稳定应用。
M-G370PDF特点
型号 | M-G370PDS | M-G370PDG | M-G370PDF | |
体积小、重量轻 | 24 x 24 x 10 mm, 10g | 24 x 24 x 10 mm, 10g | 24 x 24 x 10 mm, 10g | |
低噪音、高稳定性 | 陀螺偏置不稳定性 | 0.8°/h | 0.8°/hr | 0.8°/hr |
角随机游走 | 0.03°/√h | 0.06°/√hr | 0.06°/√hr | |
6个自由度 | 三重陀螺仪 | ±200 °/s | ±450 °/s | ±450 °/s |
三轴加速度计 | ±10G | ±8/±16G | ±10G | |
数据分辨率 | 16 / 32bit | 16 / 32bit | 16 / 32bit | |
数字串行接口 | SPI / UART | SPI / UART | SPI / UART | |
工厂校准稳定性 | Bias, Scale Factor & Axial alignment | Bias, Scale Factor & Axial alignment | Bias, Scale Factor & Axial alignment | |
数据输出率 | to 2kSps | to 2kSps | to 2kSps | |
校准温度范围 | -40°C to +85°C | -40°C to +85°C | -40°C to +85°C | |
工作温度范围 | -40°C to +85°C | -40°C to +85°C | -40°C to +85°C | |
低功耗 | 16mA (Typ.) @ 3.3V | 16mA (Typ.) @ 3.3V | 16mA (Typ.) @ 3.3V | |
应用
• 无人驾驶飞行器,如工业无人机、地面和水下飞行器
• 天线平台稳定
• 相机支架
• 振动控制和稳定
• 导航系统
 在线咨询
在线咨询
 微信服务
微信服务




