
低噪音、高稳定性;陀螺偏置不稳定性: 1.2 °/h;角度随机游走:0.08°/√h
6 个自由度:三重陀螺仪:±450°/s;三轴加速度计:±8G / ±16G
数据分辨率:16 / 32bit
数字串行接口:SPI/UART
校准稳定性:偏差、比例因子、轴向对齐
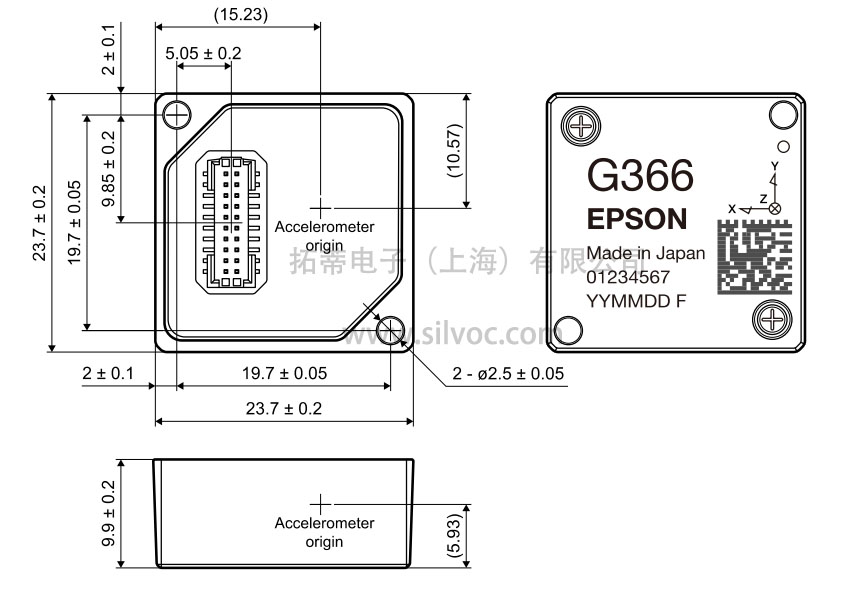
M-G366PDG :爱普生(EPSON)惯性测量单元 (IMU)
M-G366PDG:爱普生(EPSON)的标准IMU型号,支持姿态输出

M-G366PDG0 概述
M-G366PDG0是一款具有6个自由度的小型惯性测量单元(IMU):三轴角速率和线性加速度,并通过使用高精度补偿技术提供高稳定性和高精度测量能力。各种校准参数存储在IMU的存储器中,并在IMU电源打开后自动反映在发送给应用程序的测量数据中。通用SPI/UART支持主机通信,M-G366PDG0减少了用户引入惯性测量的技术障碍,并最大限度地减少了实现惯性运动分析和控制应用的设计资源。IMU的高稳定性、高精度和小尺寸等特点使其易于在工业系统的各个领域创建和区分应用。
M-G366PDG特性一览表
型号 | M-G366PDG | |
体积小、重量轻 | 24 x 24 x 10 mm, 10grams | |
低噪音、高稳定性 | 陀螺偏置不稳定性 | 1.2°/hr |
角随机游走 | 0.08°/√hr | |
6个自由度 | 三重陀螺仪 | ±450 °/sec |
三轴加速度计 | ±8G, ±16G *1 | |
数据分辨率 | 16 / 32bit | |
数字串行接口 | SPI / UART | |
工厂校准稳定性 | 偏移、比例因子和轴向对齐 | |
数据输出率 | to 2kSps | |
校准温度范围 | -40°C to +85°C | |
工作温度范围 | -40°C to +85°C | |
低功耗 | 16mA (Typ.) @ 3.3V | |
姿态输出函数 | 欧拉角(滚转/俯仰) 倾斜角度(X/Y轴) | |
*1 加速计输出范围可通过寄存器设置进行选择
l 天线平台稳定
l 相机支架
l 导航系统
l 振动控制与稳定
l 指向和跟踪系统
l 自动驾驶汽车
 在线咨询
在线咨询
 微信服务
微信服务




